0
LinuxCNC
Le projet Ra&D interne LinuxCNC a pour objectif de réaliser une étude de faisabilité pour évaluer l’utilisation d’une plateforme basée sur LinuxCNC pour piloter une machine-outils 5 axes à haute dynamique.
Groupe en lien :
mecatronYx 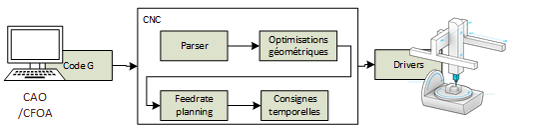
Description
Les consignes pour les drives sont transmises à une cadence de 10 kHz via un master EtherCAT en utilisant une horloge distribuée. Cette plateforme permet de développer et de valider les algorithmes d’optimisation de trajectoires efficacement sur des géométries complexes.
Plus d'informations
Contacts

Alain Schorderet
Professeur HES ordinaire
Responsable du groupe thématique de compétence Machines et conception